
说起工程建设中,大型构件的重量和尺寸不断突破传统极限,单台起重机的起重能力和作业幅度往往无法满足需求。多台起重机协同作业(俗称”抬吊”)成为必然选择。然而,多机协同作业面临空间干涉、载荷分配不均、通信延迟等一系列安全挑战。智能起重机多机协同作业与防碰撞系统的提出,为这一难题提供了系统性的技术解决方案。
河南克鲁德重工有限公司提供各吨位智能起重机多机协产品,出厂价直供,质量可靠。
多机协同作业的系统架构
多机协同作业系统采用”集中式监控、分布式控制”的混合架构。系统核心由三部分组成:中央协调控制器作为决策中枢,负责全局任务分配、路径规划和冲突检测;机载智能终端部署于每台起重机上,执行本地运动控制、传感器数据采集和实时反馈;高速通信网络(5G/WiFi6)则保障各节点之间的低延迟数据交互。中央协调控制器通过接收各机载终端上报的吊钩位置、臂架角度、负载重量等信息,结合三维空间模型进行协同路径解算,确保多台起重机在作业过程中保持安全间距。
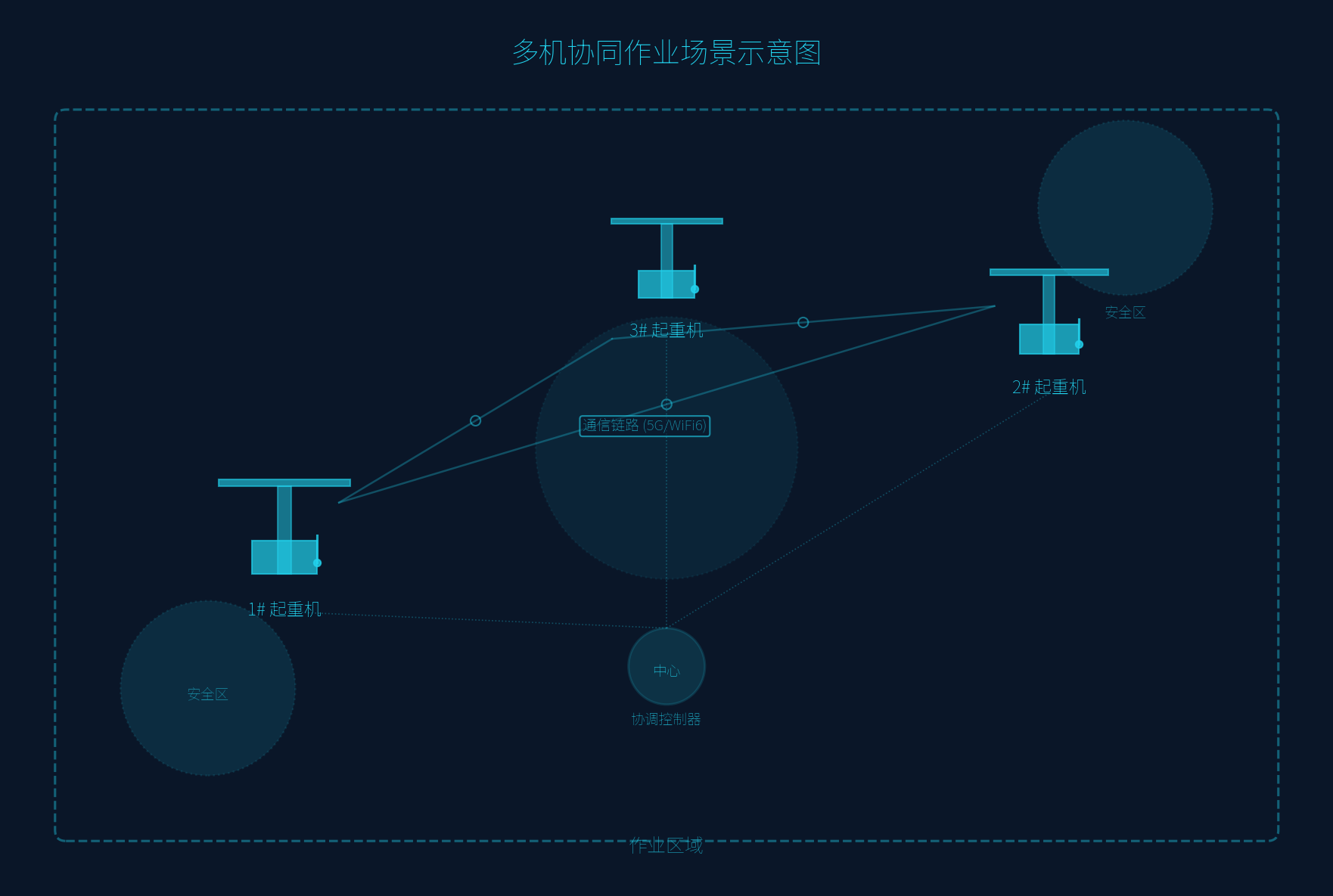
多台起重机协同作业场景示意图
▲ 图1:多机协同作业场景示意图,三台起重机在作业区域内通过5G通信链路与中心协调控制器互联,各起重机周围设定有安全区,确保作业间距。
防碰撞系统的核心原理
防碰撞系统是保障多机协同安全的关键防线。系统采用”感知—融合—评估—决策—执行”的五级闭环控制模型。首先,部署在起重机臂架和车体上的激光雷达和毫米波雷达以每秒10—50次的频率对外部环境进行三维扫描,获取周围障碍物及相邻起重机的精确位置和运动速度。随后,机载处理器通过卡尔曼滤波算法对多传感器数据进行融合,消除噪声干扰,构建实时的空间态势图。在此基础上,系统基于距离矢量法和运动预测模型评估碰撞风险等级,当预测间距低于安全阈值(通常设定为2—5米)时,自动触发降速运行、路径重规划乃至紧急制动等分级保护措施。

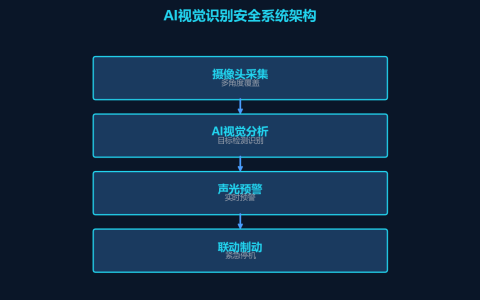
防碰撞系统工作原理流程
▲ 图2:防碰撞系统工作原理流程,从传感器检测到制动保护共经历五个阶段,形成完整的闭环控制。
关键技术与创新点
在空间定位方面,系统融合了RTK-GPS高精度定位与IMU惯性导航技术,在室外开阔环境下定位精度可达厘米级,即使在GPS信号较弱的厂房内部,也可通过UWB室内定位系统实现亚米级定位。在通信层面,5G网络的低延迟特性(端到端时延<10ms)使得多台起重机之间的状态同步频率可达100Hz以上,远高于传统4G方案的20Hz,显著降低了因通信延迟导致的碰撞风险。此外,系统引入了数字孪生技术,在虚拟空间中实时映射每台起重机的运动状态,使操作人员在远程控制中心即可直观监控整个作业过程。
工程应用与效益
目前,该技术已在国内多个重点工程中得到验证。在某大型风电项目吊装中,三台300吨级全地面起重机通过智能协同系统成功实现了长达80米的风机叶片整体吊装,作业效率较传统单机吊装提升了约40%,且全程未发生任何碰撞事件。在港口码头领域,多台门座式起重机通过防碰撞系统的协同调度,集装箱装卸效率提升了25%以上。实践证明,智能起重机多机协同作业与防碰撞系统不仅大幅提高了吊装作业的安全性和效率,还降低了对操作人员经验的依赖,为起重行业的智能化转型提供了坚实的技术支撑。
结语与展望
智能起重机多机协同作业与防碰撞系统是工业物联网、人工智能与传统起重装备深度融合的典型成果。随着5G—Advanced和边缘计算技术的进一步成熟,未来的多机协同系统将具备更强的实时性和智能化水平,有望实现完全无人化吊装作业。起重机行业应抓住这一技术变革机遇,加快智能化产品的研发和推广应用,推动行业向安全、高效、智能的方向持续迈进。
河南克鲁德重工有限公司作为专业起重设备生产厂家,提供各吨位智能起重机多机协产品及服务,欢迎咨询选型方案。
河南克鲁德重工有限公司

原创文章,作者:克鲁德重工,如若转载,请注明出处:https://i.qizhongji.com/w/194.html

{kind=link}