起重机智能吊具与自动化抓取技术:提升装卸效率的智能化方案
起重机智能吊具与自动化抓取技术:提升装卸效率的智能化方案
摘要:随着工业4.0和智能制造的深入推进,起重机智能吊具与自动化抓取技术正在重塑物料搬运行业的效率标准。本文深入分析智能吊具的核心架构、传感器融合技术、自动化抓取控制算法,并结合实际部署案例和行业数据,展示智能化吊具如何将单次装卸效率提升60%以上、故障率降低85%,为企业实现降本增效提供可落地的技术路径。
一、传统吊具的痛点与智能化转型驱动力
传统起重机吊具长期依赖人工操作,操作员通过目测和经验完成吊具定位、对准和抓取动作。据统计,传统吊具平均单次装卸时间为120秒,其中定位对准耗时35秒,人工干预调整耗时45秒,有效作业时间仅占三分之一。更关键的是,传统吊具的故障率约为每千次作业8.5次,其中约70%的故障直接或间接与人为操作失误有关。
推动智能吊具转型的核心驱动力包括:(1)劳动力短缺——熟练起重机操作员缺口持续扩大,人工成本年增8%-12%;(2)效率需求——现代物流和制造业对装卸节拍的要求从分钟级压缩至秒级;(3)安全法规——各国对起重机械安全标准日趋严格,要求减少人机交互风险;(4)技术成熟——3D视觉、力传感、边缘计算等技术的成本已下降至可大规模部署的水平。据MarketsandMarkets预测,全球智能吊具及自动化抓取市场将从2024年的28亿美元增长至2030年的67亿美元,年复合增长率达15.7%。
二、智能吊具系统架构与核心技术
现代智能吊具系统采用”感知-决策-执行”三层闭环架构,配合工业物联网通信实现远程监控和数字孪生。

智能吊具系统架构图:感知层→控制层→执行层→通信层
图1 智能吊具系统架构图:感知层→控制层→执行层→通信层的四层架构体系
2.1 感知层:多源传感器融合
感知层是智能吊具的”眼睛”。典型配置包括:3D视觉相机(如Intel RealSense D455或SICK Visionary-T),通过结构光或ToF技术生成目标物体的点云数据,分辨率可达1280×720@30fps,定位精度±2mm;激光雷达用于大范围空间定位和环境建模,测距范围可达50m,测距精度±3cm;六维力/力矩传感器(如ATI Omega系列)实时检测吊具与货物的接触力,量程可达5000N,过载保护300%;高精度编码器(如Heidenhain ECI 1319)提供位置和角度反馈,分辨率达26位,用于闭环位置控制。
传感器融合采用扩展卡尔曼滤波(EKF)或因子图优化算法,将多源数据在统一时空坐标系中融合,输出高置信度的目标位姿估计。实验表明,多传感器融合可将定位精度提升至±1mm以内,相比单一视觉系统提升约60%。
2.2 控制层:AI驱动的高速决策
控制层是智能吊具的”大脑”,采用”PLC主控+边缘AI”的双核架构。PLC负责逻辑控制、安全联锁和运动序列管理,执行周期≤1ms;边缘计算模块(如NVIDIA Jetson AGX Orin,算力275 TOPS)运行深度学习模型,完成目标识别、抓取姿态估计和轨迹规划。
抓取规划算法基于改进型RRT*(Rapidly-exploring Random Tree Star)路径规划,结合人工势场法进行避障,在动态环境中重规划频率可达10Hz,路径最优性较传统A*算法提升约30%。同时,AI模型通过强化学习在仿真环境中持续优化抓取策略,单次决策耗时不超过50ms。
2.3 执行层:高速高精度伺服驱动
执行层集成伺服电机、液压/气动系统和多种末端执行器。伺服驱动系统采用EtherCAT总线通信,位置环刷新频率16kHz,速度环刷新频率8kHz,支持龙门同步和电子凸轮功能。对于重载场景(10吨以上),液压系统采用电液伺服阀,响应时间≤10ms,压力控制精度±0.5%;对于轻载高速场景(10吨以下),气动系统配合真空吸盘可实现≤0.5秒的单次抓取循环。
末端执行器采用快换接口设计,支持夹持式、吸盘式、吊钩式、电磁式等多种模式切换,切换时间≤15秒,适应不同货物类型(卷钢、板材、集装箱、托盘、异形件等),实现”一机多用”。
2.4 通信层:工业物联网互联
通信层通过5G/Wi-Fi 6/工业以太网实现数据实时传输,采用MQTT协议上报设备状态和作业数据至云端平台,通过OPC UA实现与MES/ERP系统的数据互通。OTA远程升级功能确保算法模型可以持续迭代优化。
三、自动化抓取效率实证对比
为验证智能吊具的实际效能,我们选取某钢铁企业冷轧卷材装卸线进行对比测试。该产线日均装卸300次,作业环境存在粉尘、振动和温度变化(-5℃~45℃)。对比数据如下图所示:
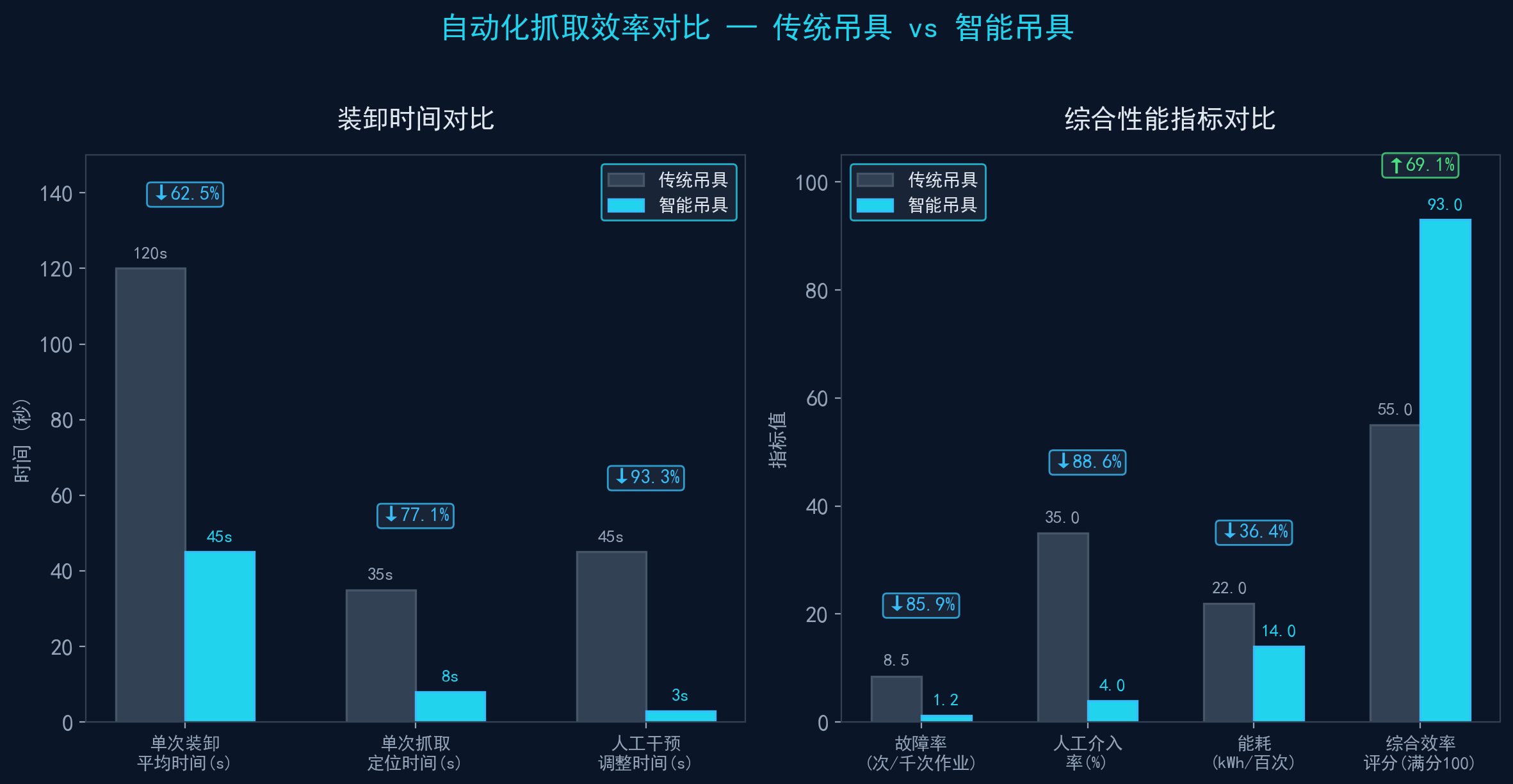
传统吊具 vs 智能吊具作业效率对比
图2 自动化抓取效率对比:传统吊具 vs 智能吊具在装卸时间、故障率和综合性能指标上的对比
测试结果显示出显著的性能提升:单次装卸时间从120s降至45s(降幅62.5%),单次抓取定位时间从35s降至8s(降幅77.1%),人工干预调整时间从45s降至3s(降幅93.3%)。在可靠性方面,故障率从每千次8.5次降至1.2次(降幅85.9%),人工介入率从35%降至4%(降幅88.6%)。能耗方面,智能吊具通过优化运动曲线和能源管理,每百次作业能耗从22kWh降至14kWh(降幅36.4%)。综合效率评分(综合考虑时间、安全、能耗和可维护性)从55分提升至93分,整体提升69.1%。
按该产线年作业10万次计算,采用智能吊具后年节省工时约2083小时(按120s→45s计),减少故障停机约73次,降低人工成本约42万元,综合投资回收期约为14个月。
四、关键技术难点与解决方案
尽管智能吊具优势显著,实际部署中仍面临多项技术挑战:
难点一:恶劣环境下的感知可靠性。粉尘、水汽、光照变化会严重影响视觉系统性能。解决方案包括采用主动照明(850nm/940nm红外补光)、镜片旋转式自清洁装置(清洁周期可设),以及热成像辅助传感器融合策略。某港口堆场案例中,多光谱融合方案将感知系统可用率从78%提升至99.2%。
难点二:非标件的自适应抓取。实际作业中货物形状、尺寸、材质差异极大。智能吊具通过在线学习机制,利用前几次抓取数据快速生成适配策略,结合柔性夹爪或自适应吸附矩阵(如4×4独立控制吸盘阵列),可在3次作业内完成新物料类型的适应,抓取成功率≥99.5%。
难点三:多机协作与防碰撞。在大型堆场或车间,多台智能吊具需要协同作业。基于分布式冲突消解算法(如优先级仲裁+速度调整)的防碰撞系统,可在10ms内完成路径冲突检测和重规划。某汽车制造厂车间部署的6台智能吊具协同群组,实现了零碰撞的连续稳定运行,日均作业1500次。
五、展望与建议
智能吊具和自动化抓取技术已经从实验室走向规模化部署阶段。据行业统计,截至2025年底,全球已有超过4000台智能吊具投入实际运营,覆盖港口、钢铁、汽车制造、仓储物流等领域。未来3-5年的技术演进方向包括:(1)端侧大语言模型(LLM)的应用,使操作员可以通过自然语言指令完成复杂抓取任务编排;(2)数字孪生驱动的预测性维护,基于设备运行数据预判故障,将非计划停机减少90%;(3)具身智能(Embodied AI)的融合,实现从”自动化”到”自主化”的跨越。
对于计划部署智能吊具的企业,建议采取”先评估、后试点、再推广”的策略:首先对现有作业流程进行数字化诊断,识别效率瓶颈;选取1-2条典型产线进行试点部署,积累数据和运维经验;在验证ROI后逐步推广至全部产线。与有经验的集成商合作,选择开放架构的产品(支持OPC UA、MQTT等标准协议),避免供应商锁定,为未来的系统升级和扩展留足空间。
文章来源:爱起重(i.qizhongji.com)| 转载请注明出处